
Les océans contiennent actuellement entre 26 et 66 millions de tonnes de déchets, dont 94 % se déposent sur les fonds marins. Jusqu’à présent, les efforts de collecte se sont concentrés principalement sur les débris de surface, et ceux entrepris pour enlever les débris sous-marins impliquent des plongeurs humains travaillant dans des conditions dangereuses. Un groupe de chercheurs, soutenu par l’Union européenne (UE), développe le première flotte de robots autonomes intelligents pour lutter contre les débris à la fois en surface et au fond des océans.
Le projet SeaClear2.0, financé par l’UE, développe le premier système robotique et d’intelligence artificielle autonome capable de trouver et d’éliminer les débris du fond de l’océan.
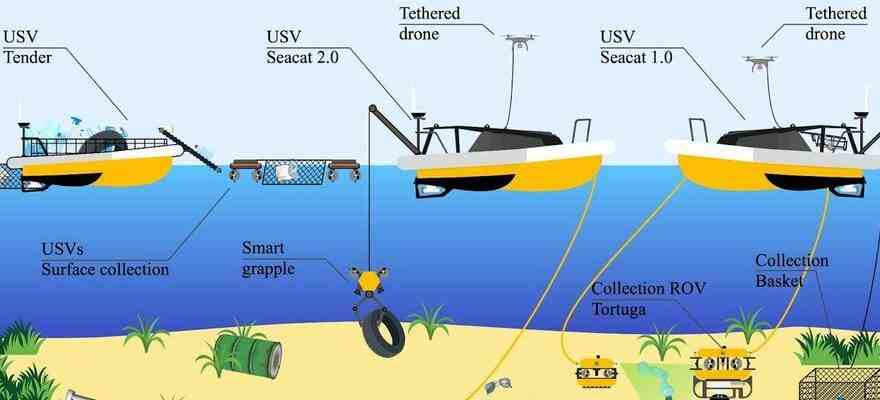
L’idée est de déployer une flotte de robots intelligents pour d’abord identifier puis éliminer les débris marins. Le système utilise un combinaison de drones aériens, de rovers sous-marins, de navires de surface autonomes et de pinces robotisées Fait sur mesure.
Portant intelligence artificielleles robots peuvent identifier, localiser et collecter les ordures de manière autonome. L’équipe vise à étendre considérablement les capacités du système prédécesseur, SeaClear1.0, qui passe déjà les tests avec brio.
Le cœur technologique de SeaClear2.0 est un système robotique bien amélioré pour la collecte automatisée des ordures, qui peut aller plus loin que SeaqClear1.0, soulever des ordures plus lourdes et s’attaquer également aux ordures de surface.
Le « vaisseau-mère », nommé « SeatCat ». MerClair
SeaClear2.0 détectera les débris avec un sondeur haute résolutionainsi que d’autres types de capteurs. Il développera également griffe intelligente et maniable qui peuvent ramasser de gros déchets, tels que des pneus, des vélos ou des tuyaux.
Les premiers essais, en Méditerranée
Pour transporter des déchets plus volumineux et plus lourds, les scientifiques concevront un nouveau tender avec des chambres de division flexibles pour différentes fractions de déchets, similaires aux séparateurs de tiroirs réglables.
LLes déchets de surface seront collectés par des équipements mobiles autonomes qui peut fonctionner dans des zones confinées et peu profondes.
Avec près de 500 millions de tonnes de plastiques qui arrivent chaque année dans les mers européennesles solutions technologiques pour identifier et éliminer les déchets doivent être combinées avec « interventions sociales prévenir et réduire la production et le rejet de déchets par les citoyens« , disent les promoteurs du projet.
Ainsi, SeaClear2.0 fournit responsabiliser et activer les citoyens par le biais d’activités d’engagement, notamment la narration géographique, une application ludique de signalement des déchets, des nettoyages, des expositions, des concours et des installations artistiques.
L’équipe proposera également meilleures solutions de tri et de recyclage pour augmenter la valeur des déchets collectés, et travaillera avec les communautés locales pour développer des recommandations pour nouvelles politiques et ainsi combler les lacunes existantes dans les politiques actuelles.
Le système d’exploitation de la collecte des ordures sur les fonds marins. MerClair
Le nouveau système amélioré fera l’objet de trois démonstrations grandeur nature et de trois essais pilotes autour du méditerranéen. De plus, le projet financera cinq sous-projets pour valider des parties du système et de l’approche dans d’autres régions du bassin méditerranéen.
Le projet SeaClear2.0 a démarré le 1er janvier et durera quatre ans. La réunion de lancement est déjà prévue le 14 février, à Delft, aux Pays-Bas.
Un ‘vaisseau-mère’, un drone et deux ‘tortues’
Le processus commence par l’utilisation de un engin de surface sans pilote, le ‘SeaCat’, qui scanne le fond marinfaites une carte bathymétrique 3D et marquez tous les gros débris que vous trouvez.
Le ‘SeaCat’ sert également de ‘vaisseau-mère‘ : tous les autres robots se déploient, communiquent et y retournent. Ils sont également alimentés par des fils. Les ressources informatiques nécessaires aux composants de détection, de contrôle et d’intelligence artificielle sont également hébergées dans « SeaCat ».
Lorsque l’eau est suffisamment claire, un Véhicule aérien sans pilote (un drone DJI Matrice M210 RTK modifié) chercher des ordures dans les airs. Les sacs à ordures plus grands devraient être identifiables de cette manière et éclaireront la recherche plus détaillée à l’aide du robot sous-marin à l’étape suivante.
UN petit véhicule sous-marin sans pilote, le ‘miniTurtle’ est ensuite déployé à partir du ‘SeaCat’ et effectue explorations rapprochées spécifiques des fonds marins pour trouver des déchets plus petits. À cette fin, il utilise une caméra et un sonar orientés vers l’avant, ainsi que d’autres capteurs, tels que des détecteurs de métaux. Tout cela s’ajoute à la carte qui localise les déchets.
Les déchets sont identifiés à l’aide de techniques d’intelligence artificielle et de reconnaissance d’objets d’apprentissage en profondeur. Ces réseaux profonds sont formés pour différencier les déchets de la vie marine et ainsi garantir que le système ne collecte que ce qu’il doit.
puis agir une seconde robot marin, nommé ‘Tortue‘, équipé d’une pince qui comprend un dispositif d’aspiration qui aide à ramasser les ordures dans des circonstances difficiles, comme lorsqu’il est parmi les algues. Chaque déchet est récupéré avec une grande précision puis collecté.
Un budget de 9 millions
Pour planifier les itinéraires et contrôler le mouvement des robots d’observation et de collecte, ils sont exploités techniques intelligentes, telles que l’apprentissage par renforcement et le contrôle basé sur les données.
Enfin, il déroule un corbeille du ‘SeaCat’, et le robot ‘Turtle’ prend chaque déchet et le dépose dedans pour ensuite le transporter jusqu’au rivage. L’ouverture du panier est spécialement conçue pour interagir efficacement avec le grappin afin d’empêcher les débris flottants de retourner à l’eau.
Mais le panier n’est pas qu’un composant passif, il envoyer activement des signaux pour aider le robot à se situer à l’endroit idéal pour profiter de l’ouverture.
L’équipe du projet ‘SeaClear’. MerClair
Le projet est financé par le programme « Horizon Europe » de l’UE. Son budget total est d’un peu plus de 9 millions d’eurosdont près de 8 proviennent de fonds communautaires.
Le consortium est composé de 13 partenaires de 9 pays, avec un mélange d’expertise dans l’engagement public, l’élaboration de politiques, la perception et le contrôle robotiques, l’intelligence artificielle, la technologie et les opérations marines et de plongée, et le tri et le recyclage des ordures.
SeaClear2.0 (Scalable Full-cycle Marine Litter Remediation in the Mediterranean: Robotic and Participatory Solutions) prendra fin en décembre 2026.
Site web du projet ‘SeaClear’ : https://seaclear-project.eu/
…….
Contact de la section Environnement : [email protected]