
Eine Gruppe von Forschern der Universität Zürich und Intel kombiniert, um ein zu erfinden KI-Pilot das endete damit, menschliche Champions zu schlagen Drohnenrennen. Das KI-System namens Swift gewann mehrere Rennen gegen drei Weltklasse-Champions im First-Person-View (FPV)-Drohnenrennen. Piloten könnten Quadrocopter mit einer Geschwindigkeit von über 100 km/h fliegen und sie fernsteuern, während sie ein Headset tragen, das mit einer Bordkamera verbunden ist.
Wie wurde der KI-„Pilot“ ausgebildet?
In einer Pressemitteilung teilte die Universität Zürich mit, dass Swift in einer simulierten Umgebung trainiert wurde, in der es sich selbst das Fliegen durch Ausprobieren beibrachte, wobei eine Art maschinelles Lernen namens Reinforcement Learning zum Einsatz kam. Der Einsatz von Simulationen trug dazu bei, die Zerstörung mehrerer Drohnen in den frühen Phasen des Lernens zu vermeiden, wenn das System häufig abstürzt. Die Drohne flog autonom dank sehr präziser Positionen, die ein externes Positionsverfolgungssystem lieferte, und zeichnete gleichzeitig Daten von ihrer Kamera auf. Dadurch lernte das System, Fehler bei der Interpretation der Daten der Bordsensoren automatisch zu korrigieren.
Wie hat es den Menschen geschlagen?
Nach Angaben der Universität war dies nicht das erste Mal, dass autonome Drohnen Menschen attackierten. Allerdings brauchten sie früher für den Flug über eine Rennstrecke doppelt so lange wie von Menschen gesteuerte Exemplare, es sei denn, sie verließen sich auf ein externes Positionsverfolgungssystem, um ihre Flugbahnen präzise zu steuern. Swift reagiert jedoch in Echtzeit auf die Daten, die von einer Bordkamera gesammelt werden, wie sie nach Angaben der Universität von menschlichen Rennfahrern verwendet wird.
Es verfügt über eine integrierte Trägheitsmesseinheit, die Beschleunigung und Geschwindigkeit misst, während ein künstliches neuronales Netzwerk die Daten der Kamera nutzt, um die Drohne im Raum zu lokalisieren und die Tore entlang der Rennstrecke zu erkennen.
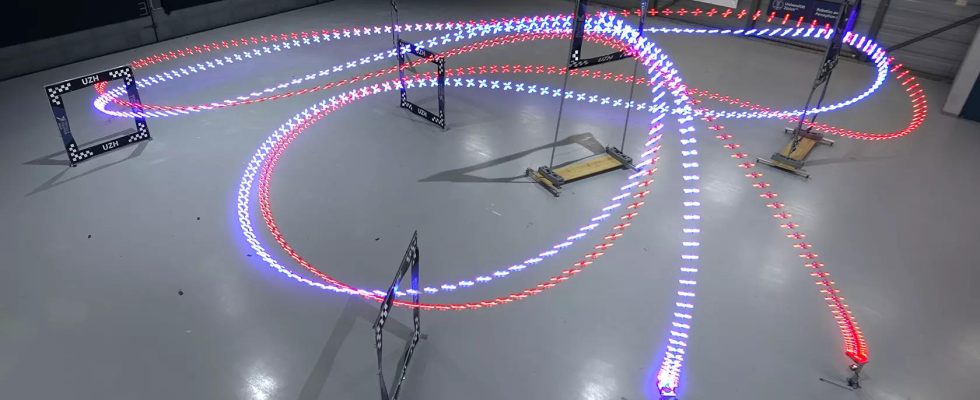
Swift trat mit dem Drone Racing League-Champion 2019 Alex Vanover, dem MultiGP Drone Racing-Champion 2019 Thomas Bitmatta und dem dreifachen Schweizer Meister Marvin Schaepper an. Die Rennen fanden zwischen dem 5. und 13. Juni auf einer eigens dafür errichteten Strecke in einem Hangar des Flughafens Dübendorf in der Nähe von Zürich statt. Die Strecke erstreckte sich über eine Fläche von 25 x 25 Metern und umfasste sieben quadratische Tore, die in der richtigen Reihenfolge passiert werden mussten, um eine Runde zu absolvieren, einschließlich herausfordernder Manöver, darunter ein Split-S, ein akrobatisches Feature, bei dem die Drohne halb gerollt und ausgeführt wird eine absteigende Halbschleife mit voller Geschwindigkeit.
Swift fuhr die schnellste Runde, mit einer halben Sekunde Vorsprung vor der besten Runde eines menschlichen Piloten. Andererseits erwiesen sich menschliche Piloten als anpassungsfähiger als die autonome Drohne, die versagte, wenn die Bedingungen anders waren als die, für die sie trainiert wurden.
Wie wurde der KI-„Pilot“ ausgebildet?
In einer Pressemitteilung teilte die Universität Zürich mit, dass Swift in einer simulierten Umgebung trainiert wurde, in der es sich selbst das Fliegen durch Ausprobieren beibrachte, wobei eine Art maschinelles Lernen namens Reinforcement Learning zum Einsatz kam. Der Einsatz von Simulationen trug dazu bei, die Zerstörung mehrerer Drohnen in den frühen Phasen des Lernens zu vermeiden, wenn das System häufig abstürzt. Die Drohne flog autonom dank sehr präziser Positionen, die ein externes Positionsverfolgungssystem lieferte, und zeichnete gleichzeitig Daten von ihrer Kamera auf. Dadurch lernte das System, Fehler bei der Interpretation der Daten der Bordsensoren automatisch zu korrigieren.
Wie hat es den Menschen geschlagen?
Nach Angaben der Universität war dies nicht das erste Mal, dass autonome Drohnen Menschen attackierten. Allerdings brauchten sie früher für den Flug über eine Rennstrecke doppelt so lange wie von Menschen gesteuerte Exemplare, es sei denn, sie verließen sich auf ein externes Positionsverfolgungssystem, um ihre Flugbahnen präzise zu steuern. Swift reagiert jedoch in Echtzeit auf die Daten, die von einer Bordkamera gesammelt werden, wie sie nach Angaben der Universität von menschlichen Rennfahrern verwendet wird.
Es verfügt über eine integrierte Trägheitsmesseinheit, die Beschleunigung und Geschwindigkeit misst, während ein künstliches neuronales Netzwerk die Daten der Kamera nutzt, um die Drohne im Raum zu lokalisieren und die Tore entlang der Rennstrecke zu erkennen.
Swift trat mit dem Drone Racing League-Champion 2019 Alex Vanover, dem MultiGP Drone Racing-Champion 2019 Thomas Bitmatta und dem dreifachen Schweizer Meister Marvin Schaepper an. Die Rennen fanden zwischen dem 5. und 13. Juni auf einer eigens dafür errichteten Strecke in einem Hangar des Flughafens Dübendorf in der Nähe von Zürich statt. Die Strecke erstreckte sich über eine Fläche von 25 x 25 Metern und umfasste sieben quadratische Tore, die in der richtigen Reihenfolge passiert werden mussten, um eine Runde zu absolvieren, einschließlich herausfordernder Manöver, darunter ein Split-S, ein akrobatisches Feature, bei dem die Drohne halb gerollt und ausgeführt wird eine absteigende Halbschleife mit voller Geschwindigkeit.
Swift fuhr die schnellste Runde, mit einer halben Sekunde Vorsprung vor der besten Runde eines menschlichen Piloten. Andererseits erwiesen sich menschliche Piloten als anpassungsfähiger als die autonome Drohne, die versagte, wenn die Bedingungen anders waren als die, für die sie trainiert wurden.