
Ist es nicht wunderbar, dass es da draußen Forscher gibt, deren Job ganz einfach darin besteht, einen Robotervogel zu bauen? Das ist sicherlich das Ziel dieses Labors, dessen Schlagflügeldrohne oder Ornithopter es jetzt ist ausgestattet mit einer Greifklaue es auf einem nahe gelegenen Ast oder vielleicht sogar einem Finger ruhen zu lassen – eine Fähigkeit, die es zu einem viel praktischeren Werkzeug machen könnte.
Es gibt einen guten Grund, warum sich das Fliegen im Laufe der Zeit weiterentwickelt hat und Schlagflügel verwendet hat – zum einen sind sie für einen Vogel oder ein Insekt viel einfacher zu züchten als Rotoren oder Jets. Eleganz ist ein Markenzeichen des Designs der Natur, und geflügelte Kreaturen fliegen oder gleiten mit einem Minimum an Energie und viel Anmut.
Es sollte nicht überraschen, dass Wissenschaftler seit Jahrzehnten bemüht sind, den geflügelten Schlagflug in Roboterform nachzubilden, obwohl sie, wie alle biomimetischen Forschungen, auf gemischten Erfolg stoßen. Aber die École Polytechnique Fedérale de Lausanne – eine der berühmtesten technischen Universitäten der Schweiz – und die Universität Sevilla machen sich recht gut.
Das europäische multiinstitutionelle GRIFFIN-Projekt, lassen Sie uns zuerst zugeben, hat das am weitesten hergeholte Backronym, das mir je begegnet ist, und ich bin auf viele gestoßen: Allgemeines konformes Luftroboter-Manipulationssystem, das feste und Schlagflügel integriert, um die Reichweite und Sicherheit zu erhöhen . Meine Güte!
Der Flügelflug des Projekts ist seit Jahren im Gange, und es wurden verschiedene Erfolge verzeichnet die YouTube-Seite des Projekts und Seite? ˅. Sie können sehen, wie es herumflattert dieses aktuelle Video.
Aber das Problem bei dieser Methode ist, wie bei vielen Flügen, die Energie. Zu wenig Leistung und Sie können nicht lange fliegen – aber ein zu großer Akku und Sie können überhaupt nicht fliegen! (Übrigens gibt es einen neuen Respekt vor Viehraub-Adlern.) Im Labor muss ein Gleichgewicht zwischen Größe und Kapazität gefunden werden. Aber die kürzlich hinzugefügte Greifklaue könnte dazu beitragen, dies weniger besorgniserregend zu machen.
Bildnachweis: EPFL/Raphael Zufferey
Die Kralle (nur eine, um Gewicht zu sparen) musste wie der Rest des Ornithopters stark, aber leicht sein, in der Lage sein, Stangen unterschiedlicher Größe zu greifen und mit der Wahrnehmungsmaschine des GRIFFIN zu kommunizieren. Der von ihnen entworfene synchronisiert sich mit der Bewegung des Flatterns, und sein Design mit einer Art Silikonband als erstem Kontakt greift sanft, aber fest und ohne den Roboter zu erschüttern.
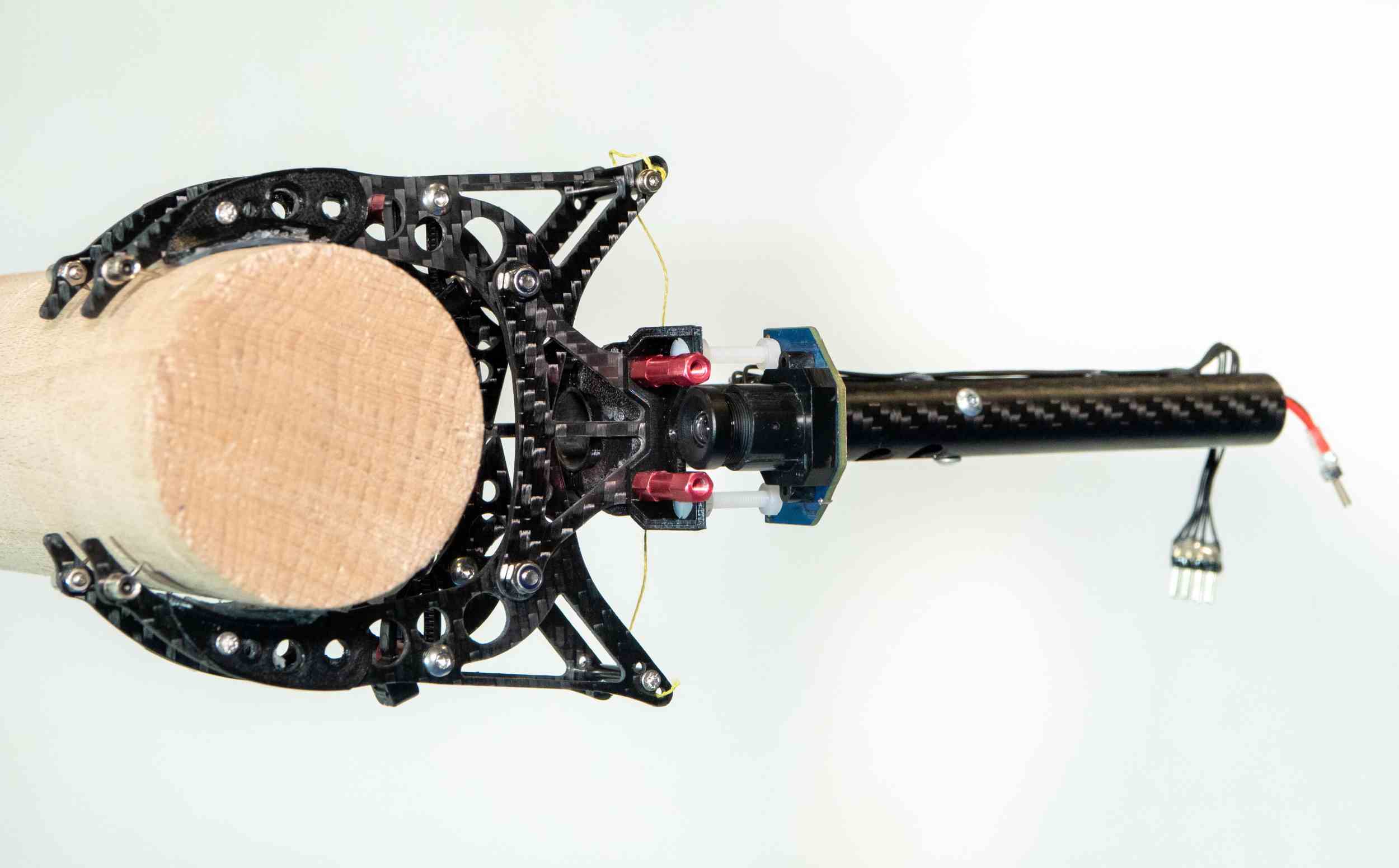
Nur nicht mit dem Finger da rein. Bildnachweis: EPFL/Raphael Zufferey
„Sobald ein Ornithopter die autonome Landung auf einem Ast beherrscht, hat er das Potenzial, bestimmte Aufgaben zu übernehmen, etwa das unauffällige Sammeln biologischer Proben oder Messungen an einem Baum. Schließlich könnte es sogar auf künstlichen Strukturen landen, was weitere Anwendungsgebiete eröffnen könnte“, sagte Raphael Zufferey, Postdoktorand an der EPFL, der derzeit in Sevilla an GRIFFIN arbeitet.
Es ist nicht nur so, dass es auf einem Ast landen und etwas tun kann; Es ist so, dass es nicht den ganzen Weg zurück an die Oberfläche gehen muss. Wenn Sie nur die Hälfte Ihrer Energie aufwenden, um vom Boden auf 10 Meter Höhe zu gelangen, schränkt das Ihre Möglichkeiten wirklich ein. Aber wenn Sie auf einem Ast landen können, laden Sie ein bisschen auf (warum haben Sie dort nicht eine kleine Solarzelle?), erledigen Sie etwas Arbeit, wie ein Foto oder eine Probe zu machen, dann hüpfen Sie zu einem anderen Ast auf der anderen Seite und machen Sie dasselbe … es sieht weniger wie eine Tech-Demo und viel mehr wie ein fähiger Robotervogel aus.
Zufferey hofft, die Entwicklung in diese Richtung fortsetzen zu können; der greifer öffnet wirklich die dinge für das projekt. Aber sie sind nicht die einzigen da draußen: Kolibri-inspirierte Drohnen, Libellen-inspirierte Drohnen, sogar Bienen-inspirierte Drohnen werden für verschiedene Zwecke entwickelt und befinden sich in unterschiedlichen Stadien der Bereitschaft. Erzählen Sie bloß nicht den „Vögeln sind keine echten“ Leuten davon.